- Tevet et al., "CLoSD: Closing the Loop between Simulation and Diffusion for multi-task character control", International Conference on Learning Representations, 2025.
- Tessler et al., "MaskedMimic: Unified Physics-Based Character Control Through Masked Motion Inpainting", SIGGRAPH Asia, 2024.
Abstract
We propose BRIC, a novel test-time adaptation (TTA) framework that enables long-term human motion generation by resolving execution discrepancies between diffusion-based kinematic motion planners and reinforcement learning-based physics controllers. While diffusion models can generate diverse and expressive motions conditioned on text and scene context, they often produce physically implausible outputs, leading to execution drift during simulation. To address this, BRIC dynamically adapts the physics controller to noisy motion plans at test time, while preserving pre-trained skills via a loss function that mitigates catastrophic forgetting. In addition, BRIC introduces a lightweight test-time guidance mechanism that steers the diffusion model in the signal space without updating its parameters. By combining both adaptation strategies, BRIC ensures consistent and physically plausible long-term executions across diverse environments in an effective and efficient manner. We validate the effectiveness of BRIC on a variety of long-term tasks, including motion composition, obstacle avoidance, and human-scene interaction, achieving state-of-the-art performance across all tasks.
Method Overview
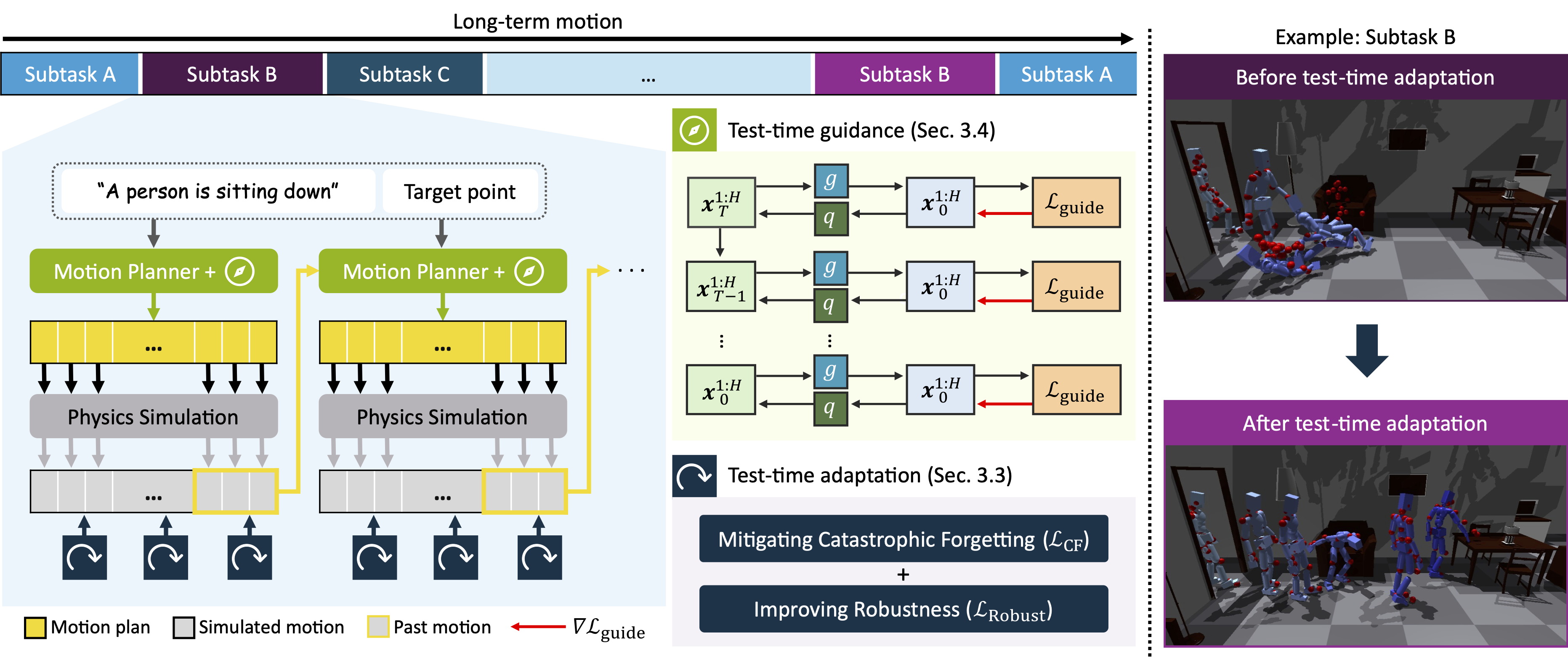
Test-time adaptation and guidance bridge the distribution gap between the motion planner and physics-based controller in an autoregressive manner. Adaptation mitigates catastrophic forgetting and improves robustness, while guidance refines motion plans by optimizing task objectives. Before adaptation, the agent fails to track motion plans indicated by red dots. After adaptation, it performs robust and successful motions.
The Effects of the Proposed Test-Time Adaptation
These videos present visual examples of the proposed method's effectiveness.
The first video compares the baseline with BRIC after applying test-time adaptation (TTA) in the
text-to-motion task.
In the second video, both methods use test-time guidance (TTG); however, only BRIC applies TTA for the HSI
task.
In this context, the baseline refers to "DiP + PHC without TTA and TTG".
Each video shows results before (early stage) and after TTA.
As shown, the policy with TTA follows the motion plan more reliably, highlighting that test-time guidance
alone is insufficient for successfully performing HSI without TTA.
Before applying TTA (Baseline) vs. After applying TTA (Baseline + TTA, i.e., BRIC)
Before applying TTA (Baseline + TTG) vs. After applying TTA (Baseline + TTG + TTA, i.e., BRIC)
The Effects of the Proposed Test-Time Guidance
These videos show the efficiency of the proposed signal space test-time guidance (TTG) in the
obstacle avoidance task.
The purple and blue humanoid robots show executions of a test-time-adapted policy, with motion planning
guided by latent-space and signal-space TTG, respectively.
The intermittently displayed on-screen label "Latency: XX s" indicates the time for diffusion-based sampling
with TTG.
As the proposed TTG avoids backpropagation through the diffusion model, the sampling speed is approximately
twofold faster than with latent-space TTG.
Signal-space TTG (Proposed)
Latent-space TTG
Qualitative Results
Except for the text-to-motion task, the qualitative result videos adhere to the following format: the left panel presents the humanoid’s movement trajectory from a top view, while the right panel depicts the humanoid’s motion from an exocentric (or third-person) perspective.